Imitation learning has been identified as a key method for training robots to perform a variety of everyday tasks, ranging from washing dishes to cooking meals. However, the success of imitation learning frameworks largely depends on the quality of human demonstrations provided to the robots. In order to collect accurate and detailed human demonstrations, teleoperation systems are often used to allow humans to control robotic manipulators.
While teleoperation systems have been instrumental in collecting human demonstrations for imitation learning, existing systems often struggle to accurately reproduce the complex and coordinated movements performed by humans. This limitation has sparked the development of more advanced teleoperation systems that can better capture the intricacies of human movement.
Introducing Bunny-VisionPro
Researchers at the University of California, San Diego have recently unveiled Bunny-VisionPro, a cutting-edge teleoperation system designed to enable the teleoperation of robotic systems for bimanual dexterous manipulation tasks. This innovative system aims to simplify the collection of human demonstrations for imitation learning by providing a more immersive and intuitive teleoperation experience.
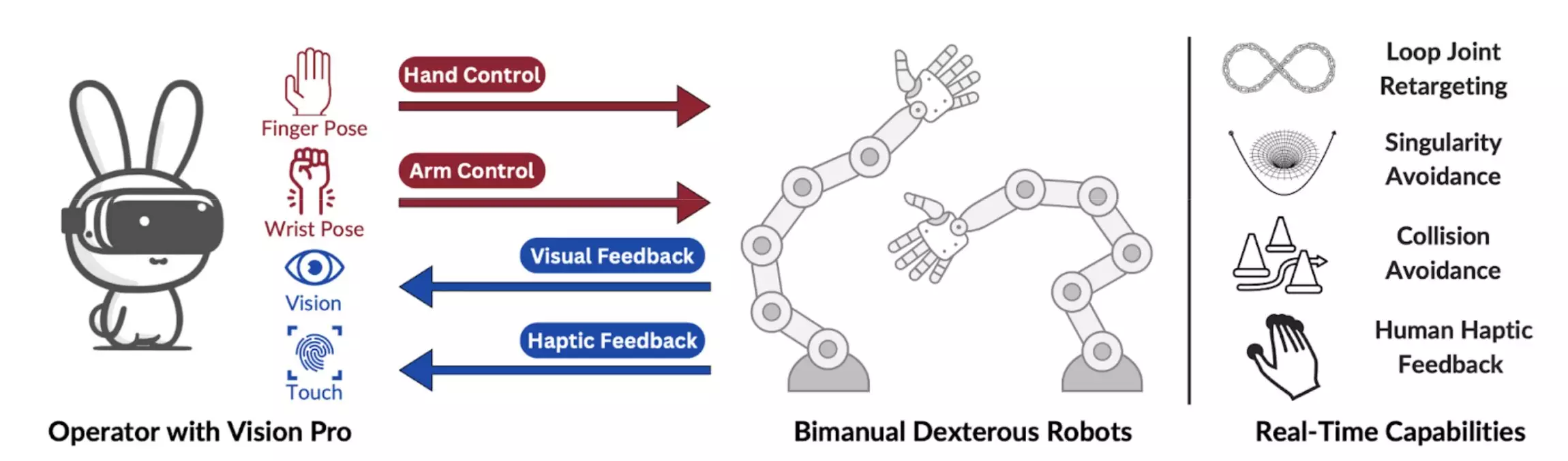
Bunny-VisionPro consists of three primary components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. These components work together to facilitate the real-time control of dual robot arms and multi-fingered hands by human operators. The system addresses challenges such as singularity and collision issues, while also providing visual and haptic feedback to enhance the teleoperation experience.
One of the key advantages of Bunny-VisionPro is its ability to enable safe and efficient control of a bimanual robotic system in real-time. Unlike previous teleoperation systems, Bunny-VisionPro integrates haptics and visual feedback to create a more immersive teleoperation experience for human users. This immersive experience not only enhances the collection of human demonstrations but also improves the overall success rates of teleoperation tasks.
Future Implications
The development of Bunny-VisionPro represents a significant step forward in the field of teleoperation for robotics. As this system becomes more widely adopted in robotics labs around the world, it has the potential to inspire the creation of similar immersive teleoperation systems. Future enhancements to Bunny-VisionPro may involve leveraging robot tactile information to further enhance precision and adaptability in manipulation tasks.
Bunny-VisionPro is a groundbreaking teleoperation system that has the potential to revolutionize the way human demonstrations are collected for imitation learning in robotics. By prioritizing safety, performance, and user experience, this system paves the way for more advanced and immersive teleoperation systems in the future.
Leave a Reply