The evolution of soft robotics has heralded a new era of flexibility, adaptability, and safety in robotic design. Among the forefront technologies are fabric-based soft pneumatic actuators (FSPAs), which stand out for their ability to deform in response to applied pressure. Unlike traditional rigid robotic parts, which are often hazardous in human interactions, FSPAs embrace an inherently gentle and dynamic approach, making them ideal for applications in wearable technology, assistive devices, and robotic grippers. Their functionality is rooted in the inflation and deflation processes, allowing for various movement capabilities that traditional materials simply cannot mimic.
However, the journey towards successfully designing and producing FSPAs isn’t without challenges. Traditional methodologies often require painstaking trial-and-error procedures to optimize material selection and actuator design, leading to inefficiencies and potential setbacks in development.
Driving Motivation Behind the Research
A recent study published in *Scientific Reports* sheds light on how Turing patterns—a set of mathematical principles introduced by Alan Turing—can revolutionize the design and production process of FSPAs. The research, spearheaded by a team including Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota’s research divisions, along with Dr. Yuyang Song from Toyota North America, highlights a compelling motivation: the need for simplified, low-cost pneumatic actuators capable of controlled movements. Dr. Tanaka emphasizes the collective recognition within the soft robotics community about the necessity for actuators that do not rely on complex or specialized materials.
The motivation stems not just from technological advancements but the potential for making robotic systems that are safer and more versatile, thereby enhancing human interaction and collaboration with robotic systems.
Central to the research is the implementation of Turing patterns derived from Turing’s morphogenesis theory. For those unfamiliar, Turing’s theory illustrated how patterns in nature, such as the distinct stripes seen on animals, can arise from simple interaction rules governing substances. The researchers’ strategy employs anisotropic materials aligned according to mathematical models inspired by Turing’s foundational principles, emphasizing that controlled design can yield significant advantages in actuator functionality.
Dr. Nomura describes how their methodology leverages gradient-based orientation optimization to harmonize material orientation with design, marking a significant departure from traditional isotropic material usage. By using a reaction-diffusion system as their basis, they managed to push the boundaries of what FSPAs can achieve through carefully crafted textures that guide resulting material behavior.
The engineering of FSPAs was prompted by the challenges associated with achieving predictable and repeatable deformations. Traditional synthesizing often relied on homogenous materials that offered uniform properties, leading to limitations in functionality. The current research addresses this inefficiency by promoting an automated production process capable of yielding diverse and distinct motion profiles aligned with application needs.
The application of mathematical models allows for a much more informed design process, creating surface textures that ensure tailored deformation in response to pneumatic stimuli. By moving away from trial-and-error and toward a design-centric approach, the research team lays the groundwork for a future where FSPAs can be produced quickly and effectively.
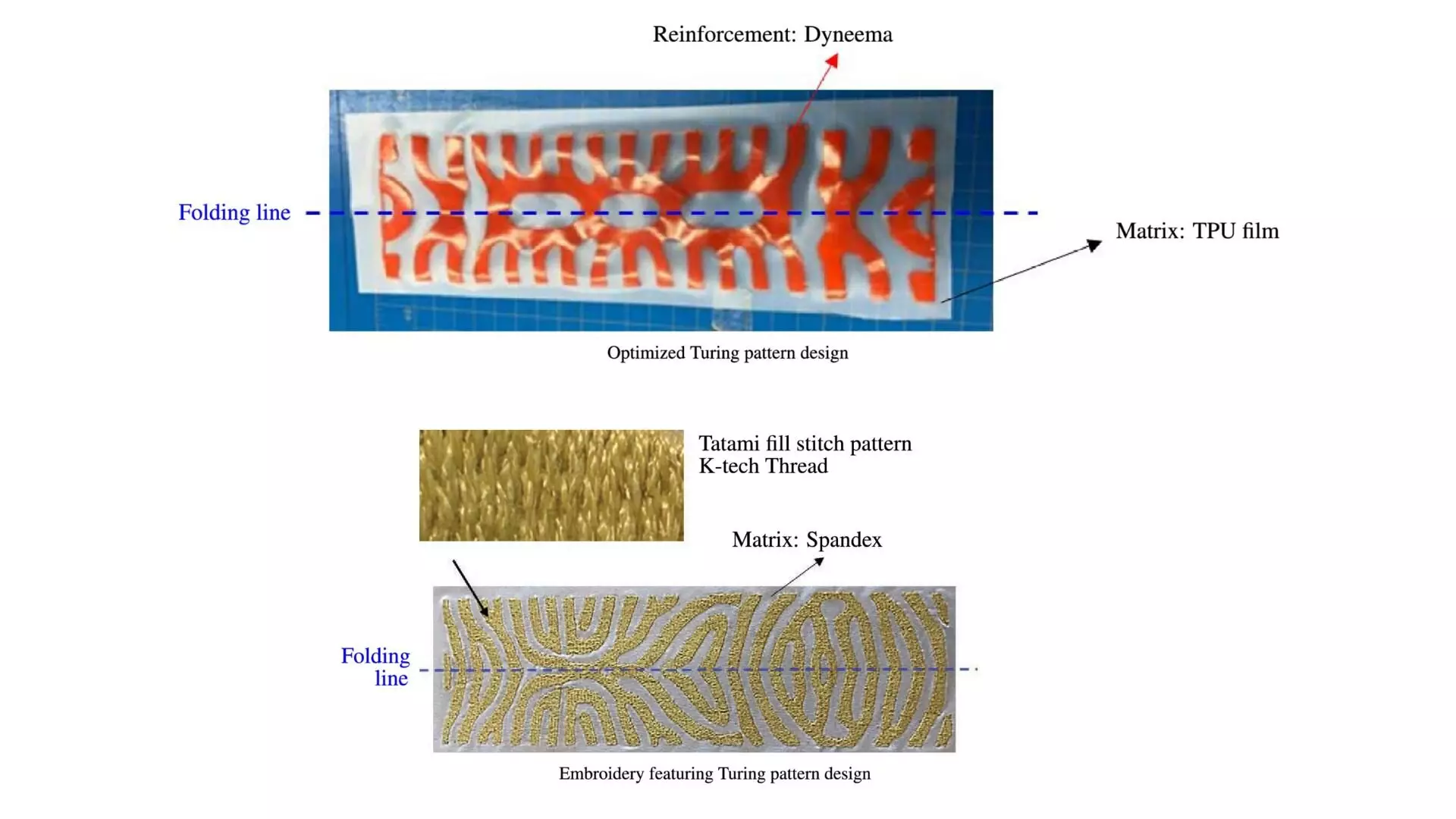
In the quest to bring their vision to life, the researchers explored two primary fabrication methods: heat bonding and embroidery. The heat bonding technique involves laser-cutting fabrics into Turing patterns and binding them with softer materials via a heat press. On the other hand, the embroidery technique integrates stiffness into soft fabrics by stitching with rigid threads, creating regions that significantly enhance movement control.
These innovative techniques mean that FSPAs can be scaled effectively while maintaining cost dominance, thus expanding their potential applications across industries striving for safety and functionality.
Future Directions in Soft Robotics
The implications of integrating Turing patterns within FSPA design are far-reaching. The researchers envision future research to encompass the amalgamation of these patterns with advanced materials like shape memory or electroactive polymers, which could further enhance actuator dynamics and responsiveness. This ongoing synergy between innovative design principles, materials science, and production techniques indicates a promising future where robotic constructions become increasingly human-akin in behavior and interaction.
Moreover, as techniques evolve and automation plays a larger role in fabrication, the possibilities for scaling production to meet burgeoning demand appear promising. Techniques, including 3D printing with flexible substances and automated weaving, may soon become standard practices, enhancing both the efficiency and precision of soft robotic applications.
The intersection of Alan Turing’s pattern theories and modern robotic engineering offers an exciting glimpse into the future of soft robotics. By embracing Turing patterns in the design of FSPAs, researchers are not just innovating; they are enhancing the very framework within which robots can interact with their environments—safely, efficiently, and flexibly. This ongoing journey not only redefines the way actuators are fabricated but also opens up a myriad of possibilities for human-friendly robotic systems.
Leave a Reply