In an age where robotics is becoming increasingly integrated into our daily lives, the ability for machines to perform tasks autonomously and efficiently is paramount. While humans can effortlessly navigate their environment to grab a simple item from a shelf or move around objects, replicating this finesse in robots has presented substantial challenges.
Motion planning—the process through which a robot plots its movement through an environment while avoiding obstacles—is a formidable hurdle in robotics. When a human reaches for a book, they instinctively adjust for obstacles that may not even be fully perceived, demonstrating a fluidity and adaptability that current robotic systems struggle to emulate. The traditional methods of motion planning are highly resource-intensive; they can require extensive processing time to evaluate various potential paths and avoid collisions. This is primarily due to the rigid algorithms that guide these robots, leaving them ill-suited for dynamic or unpredictable environments.
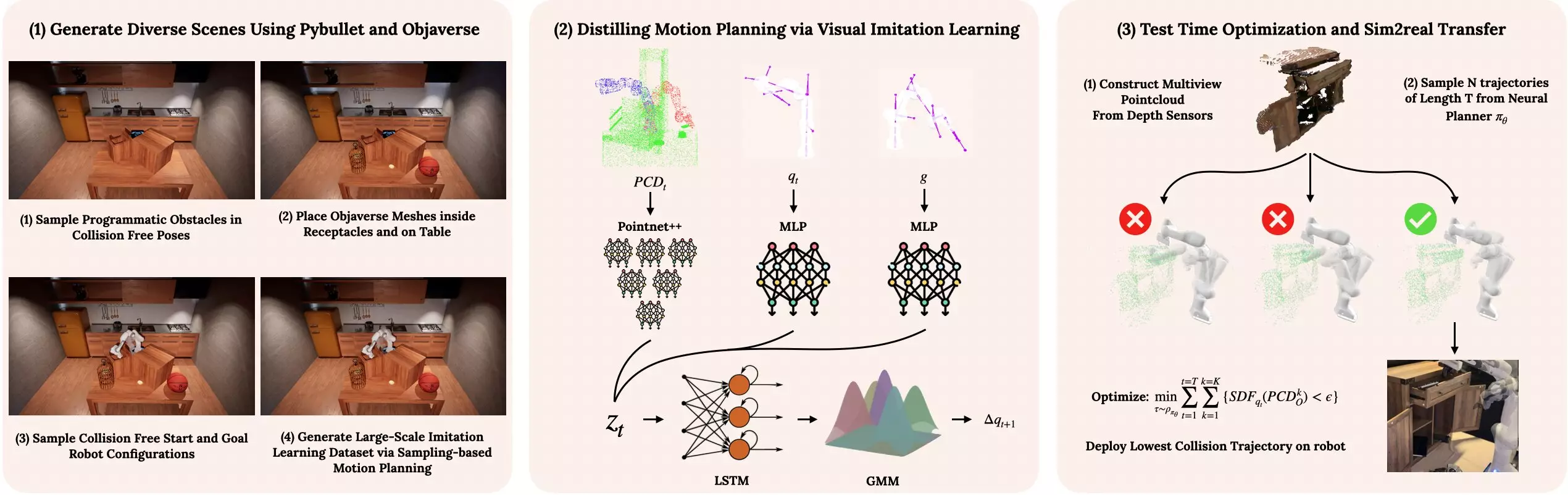
Researchers from Carnegie Mellon University’s Robotics Institute have made significant strides in addressing these issues with their innovative approach known as Neural Motion Planning. By leveraging a data-driven methodology, they developed a single, multifaceted AI model capable of various motion planning tasks across unstructured environments. This is particularly revolutionary for household settings where obstacles abound—think of navigating around dishwashers, cabinets, and even playful pets.
Murtaza Dalal, a doctoral student at RI, articulates the necessity for robots to function effectively in environments where prior knowledge may be limited. Traditional algorithms falter in these scenarios. The slow processing speeds of classic motion planning techniques can impede the efficiency required for real-world applications, especially as robots contend with millions of possible collision scenarios.
The underlying inspiration for Neural Motion Planning is rooted in human cognitive learning processes. Just as individuals refine their skills through practice, starting from cautious movements to confident and rapid actions, the Neural Motion Planning framework allows robots to build proficiency based on simulated experiences. By engaging with millions of diverse environments in a controlled setting, the model learns to adapt its movements when faced with unfamiliar obstacles.
Such simulations involve a wide variety of scenarios that mimic real-life situations, including the presence of various household items—shelves, cabinets, and unpredictable elements like pets or decorative vases. This breadth of training allows the robotic system to generate a generalist policy, establishing a framework that enables the robot to tackle tasks across differing environments effectively.
The practical implications of Neural Motion Planning extend far beyond theoretical exercises. During laboratory tests, a robotic arm equipped with this advanced motion planning system showcased its ability to navigate through a variety of obstacles seamlessly. By utilizing three-dimensional representations from depth cameras, the robotic arm could accurately identify starting and goal positions, subsequently calculating the joint configurations necessary for successful navigation.
Jiahui Yang, a master’s student at RI, expressed enthusiasm for the capabilities displayed by the robotic arm. Watching it adeptly maneuver around a myriad of furniture—a challenge that would baffle less sophisticated systems—reinforces the promise of this technology. The robot not only demonstrated its proficiency but also highlighted a significant stride toward achieving versatility essential for real-world operations.
Despite the successes achieved thus far, there is still much to aspire to in the realm of robotics. As Deepak Pathak, the Raj Reddy Assistant Professor at RI, points out, while advancements are being made in areas such as computer vision and natural language processing, robotics has historically lagged behind. However, Neural Motion Planning represents a critical advancement toward bridging this gap. By demonstrating the efficacy of large-scale learning through simulation, the researchers not only established a more dynamic robotic platform but also paved the way for future innovations.
The introduction of Neural Motion Planning reinvigorates the field of robotics, providing critical insights into how machines can become more human-like in their adaptability and efficiency. As research progresses, we stand on the cusp of realizing robots that can navigate complex, dynamic environments with ease, a step that promises to enhance their role in everyday life tremendously.
Leave a Reply