Robots are increasingly being used to assist humans in various real-world scenarios. In order to effectively carry out daily tasks, robots must be able to manipulate different types of objects with precision and efficiency. The development of cost-effective robotic grippers is crucial in enabling robots to achieve dexterous object manipulation capabilities. Recently, researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) have introduced a new two-finger robotic gripper designed to enhance robots’ ability to handle everyday manipulation tasks more effectively.
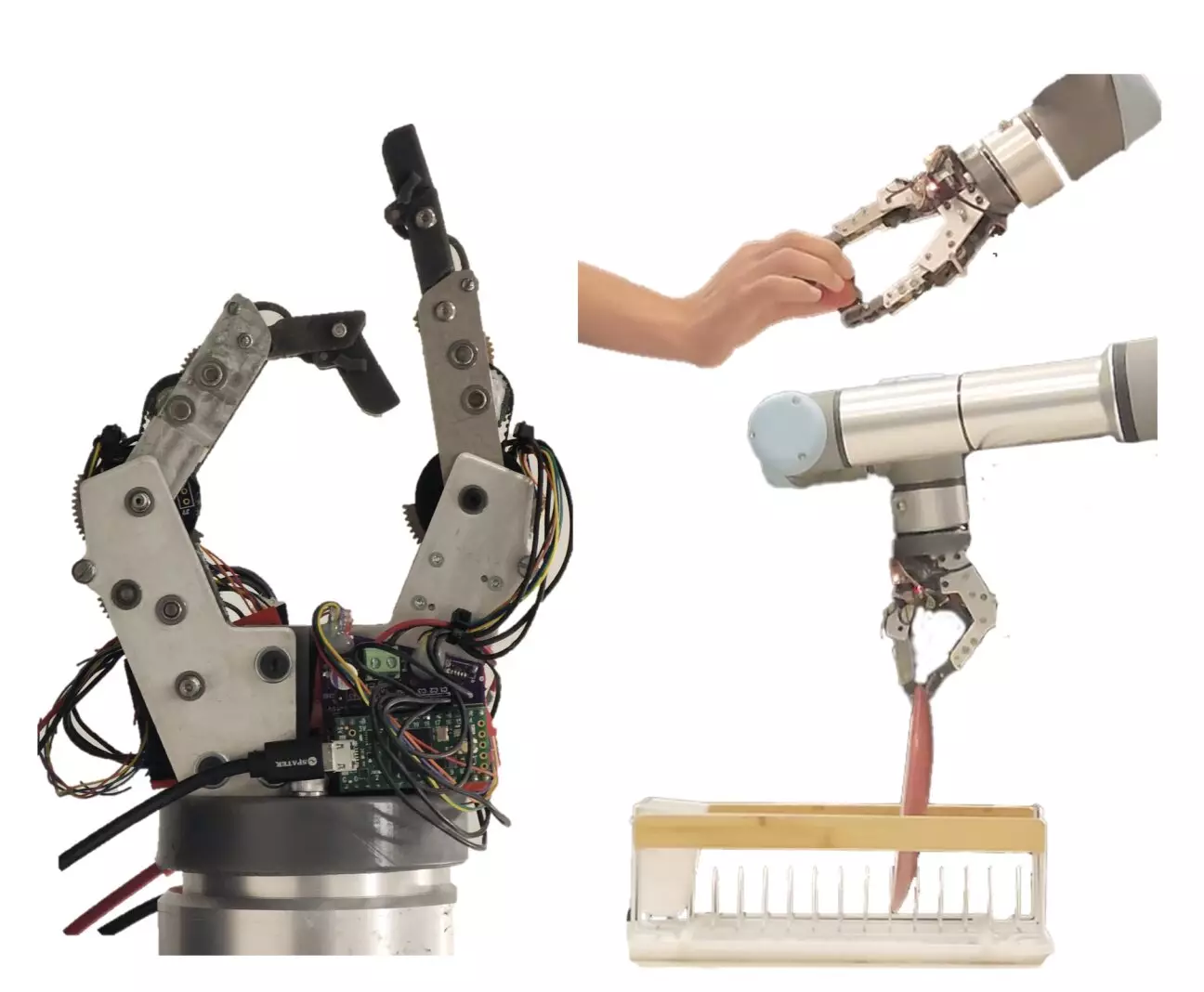
The robotic gripper developed by the researchers consists of a structure with two robotic fingers that closely resemble human fingers in both size and shape. This design allows the fingers to bend and grasp objects securely. The team’s focus was on creating a gripper that could perform simple everyday tasks such as picking up objects and placing them in specific locations. The gripper was designed with 2 degrees of freedom (DoF) using only two fingers, but there are plans to incorporate more fingers in future iterations to enhance its capabilities.
The researchers conducted real-world experiments to evaluate the performance of their two-finger robotic gripper. The experiments tested the speed, compliance, and force applied by the system while completing basic “pick-and-place” tasks. The gripper demonstrated impressive performance in picking up dishes, thin and flat objects like paper, and delicate items like strawberries. These tasks, though basic, reflect common daily activities carried out by humans.
The successful performance of the two-finger robotic gripper in the initial tests indicates its potential for the development of basic household robots. The researchers aim to further enhance the gripper’s design and functionality and explore its performance on a wider range of daily tasks. While the gripper currently has limitations in terms of the number of fingers and degrees of freedom, advancements in actuator technology could potentially allow for the integration of additional fingers in future iterations.
The development of the two-finger robotic gripper by researchers at Improbable AI Lab and MIT represents a significant advancement in robotic manipulation capabilities. The gripper’s human-like design and performance in real-world experiments demonstrate its potential for enhancing robots’ ability to handle everyday tasks effectively. As research in robotics continues to evolve, further improvements in gripper design and functionality could lead to the creation of more sophisticated and versatile robotic systems in the future.
Leave a Reply