Roboticists have been working tirelessly to create robotic grippers capable of picking up and manipulating various objects, inspired by the dexterity of human hands. While many of these grippers have shown promising results in handling complex tasks, they often come with a high degree of complexity and cost. This complexity can hinder their widespread adoption, especially in the development of energy-efficient and cost-effective robots. However, researchers at Purdue University and MIT have recently unveiled a new robotic gripper design that challenges this narrative.
The newly developed robotic gripper, with only 5 degrees of freedom (DOF), strikes a balance between high-performance manipulation capabilities and simplified control mechanisms. By combining a gripper base with two fingers, each equipped with a linear actuator and a rotational servo motor, this gripper can effectively perform human-like in-hand manipulations. The inclusion of a vision-based tactile sensor on one of the fingers further enhances its sensing capabilities, providing valuable information about the objects it grasps.
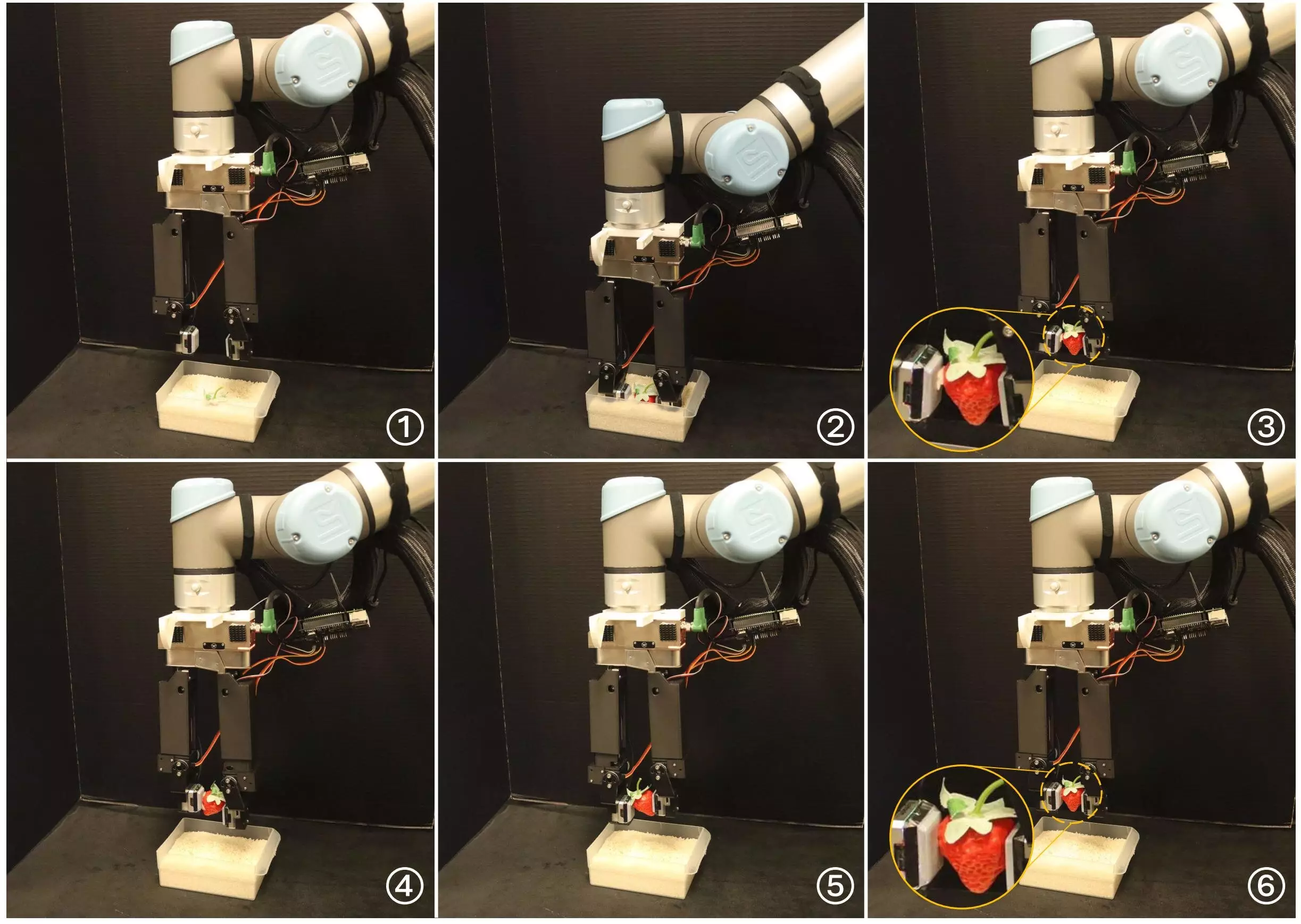
Despite having fewer DOF compared to traditional humanoid robotic hands, the new gripper showcased exceptional performance in a series of real-world experiments. It successfully completed tasks such as singulation and scooping, demonstrating a level of dexterity previously unseen in grippers with limited DOF. By simplifying the controller design and reducing complexity, this gripper opens up possibilities for more robust, cost-effective, and energy-efficient robotic solutions.
The introduction of this innovative robotic gripper paves the way for advancements in object manipulation tasks that were once considered challenging for traditional grippers. As researchers continue to refine and expand the capabilities of this gripper, it holds the potential to revolutionize the field of robotics. Its simplified design and efficient performance could serve as a blueprint for the development of other robotic systems focused on cost-effective and efficient object manipulation.
The groundbreaking work done by the research team at Purdue University and MIT has brought us one step closer to creating robotic systems that can handle complex object manipulation tasks with ease. By combining simplicity in design with advanced sensing capabilities, the new robotic gripper sets a new standard for efficiency and effectiveness in the field of robotics. As this technology continues to evolve, we can expect to see more innovative solutions that push the boundaries of what is possible in robotic manipulation tasks.
Leave a Reply